
Aprovechando este nuevo formato, Marc-André Bazergui (Bazmarc o Bazmati en Internet) ha creado el NXT 1x2 Brick Bot. Se trata de un robot construido con el inventario del NXT 2.0 que cabe dentro de un ladrillo de almacenaje de 1x2 y lo usa de coraza


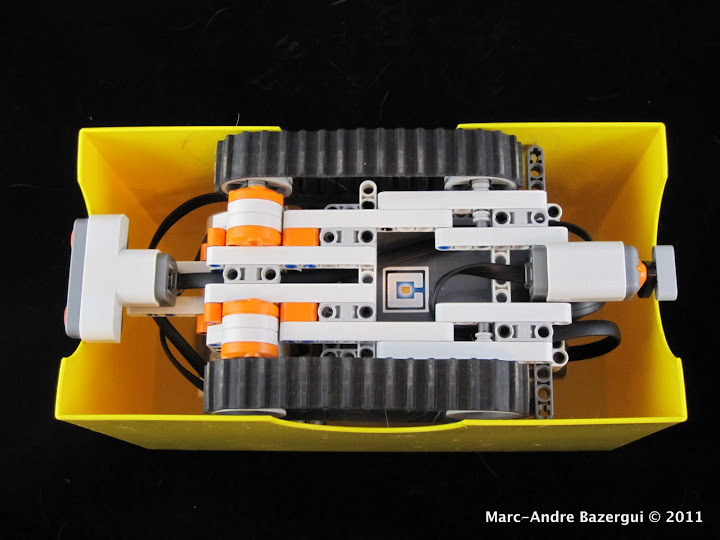
Más imágenes en Picassa.
También ha creado un robot que cabe dentro del brick 1x1. A continuación un breve vídeo que los muestra en acción, aunque para la presentación oficial habrá que esperar a LEGOWORLD Copenhague...





