
Aquí está mi primer montaje y unos comentarios sobre él.
Estaba intentando montar uno con dirección pero lo he dejado para un poco más adelante. Este tiene el clasico sistema de dos ruedas motrices y un apoyo delantero que en este caso lo he resuelto con una de las dos pelotas que trae el NXT. Creo que resulta más efectivo que otros apoyos que había utilizado hasta ahora, ya que con la pelota es más dificil que haya enganchones.
No resulta fácil, para los que estamos acostumbrados al RCX, montar los motores, son voluminosos y el modo de fijación es diferente, así que no queda otra que empezar con un procedimiento de ensayo, error y corrección.
Ahora queda mejorarlo para hacerlo un poco más robosto y prepararlo para adaptarle sensores.
He hecho un sencillo programa para probarlo. El icono que se utiliza para mover los motores permite hacer que gire (siempre que los motores estén conectados en los puertos B y C) con un mayor o menor radio de giro.
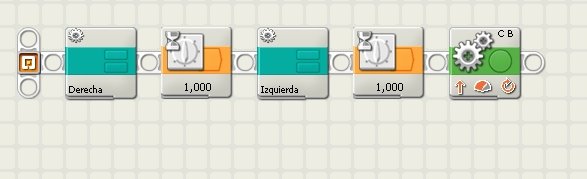
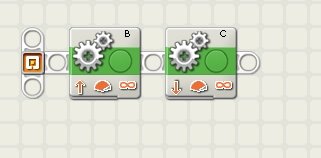
Quería un giro un poco más radical, así que he creado dos bloques propios que hacen que gire alrededor del punto medio de los apoyos de las ruedas.
 Un comentario sobre el software. mejora en gran manera el software del RIS, mejora el modo de gestionar las estructuras de control y los cableados del Robolab, pero comparándolo con el Robolab este software da muchas menos opciones de programación (dejando de lado las novedades de los motores, sensores...). Imagino que el software dirigido a educación estará más en la línea de Robolab y ofrecerá más opciones y control de la programación.
Un comentario sobre el software. mejora en gran manera el software del RIS, mejora el modo de gestionar las estructuras de control y los cableados del Robolab, pero comparándolo con el Robolab este software da muchas menos opciones de programación (dejando de lado las novedades de los motores, sensores...). Imagino que el software dirigido a educación estará más en la línea de Robolab y ofrecerá más opciones y control de la programación.
1 comentario:
felicidades koldo, se ve segun imagen que el plastico es de buena calidad. oye una buena noticia son las pelotas.
saludos desde mexico.
atte miguel angel navarro sanvicente
Publicar un comentario